
La frase “la destreza hace al profesor” suele estar reservada para los humanos, pero asimismo es una gran máxima para los robots recién desplegados en entornos desconocidos.
Imaginemos que un androide llega a un almacén. Viene equipado con las habilidades para las que fue entrenado, como colocar un objeto, y ahora necesita tomar artículos de un estante con el que no está familiarizado. Al principio, la máquina tiene dificultades para hacerlo, ya que necesita familiarizarse con su nuevo entorno. Para mejorar, el androide deberá comprender qué habilidades interiormente de una tarea común necesita mejorar y luego especializar (o parametrizar) esa bono.
Un humano podría programar el androide para optimizar su rendimiento, pero los investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Sintético (CSAIL) del MIT y el Instituto de Inteligencia Sintético han desarrollado una alternativa más eficaz. Presentado en la Conferencia de Robótica: Ciencia y Sistemas el mes pasado, su cálculo “Estimar, Inferir y Situar” (EES) permite a estas máquinas practicar por sí solas, lo que podría ayudarlas a mejorar en tareas bártulos en fábricas, hogares y hospitales.
Evaluando la situación
Para ayudar a los robots a mejorar en actividades como barrer el suelo, EES trabaja con un sistema de visión que localiza y rastrea el entorno de la máquina. A continuación, el cálculo calcula la fiabilidad con la que el androide ejecuta una bono (como barrer) y si valdría la pena practicar más. EES pronostica lo aceptablemente que podría realizar el androide la tarea común si perfecciona esa diplomacia en particular y, por postrer, practica. Seguidamente, el sistema de visión comprueba si esa diplomacia se realizó correctamente a posteriori de cada intento.
El EES podría resultar útil en lugares como hospitales, fábricas, casas o cafeterías. Por ejemplo, si quisieras que un androide limpiara tu sala de estar, necesitaría ayuda para practicar habilidades como barrer. Sin requisa, según Nishanth Kumar SM ’24 y sus colegas, el EES podría ayudar a que ese androide mejore sin intervención humana, utilizando solo unas pocas pruebas de destreza.
“Al iniciar este plan, nos preguntamos si esta especialización sería posible en una cantidad regular de muestras en un androide vivo”, dice Kumar, coautor principal de un artículo. papel “Ahora tenemos un cálculo que permite a los robots mejorar significativamente en habilidades específicas en un tiempo regular con decenas o cientos de puntos de datos, una perfeccionamiento con respecto a los miles o millones de muestras que requiere un cálculo de estudios de refuerzo tipificado”, describe el trabajo.
Ver barredura de puntos
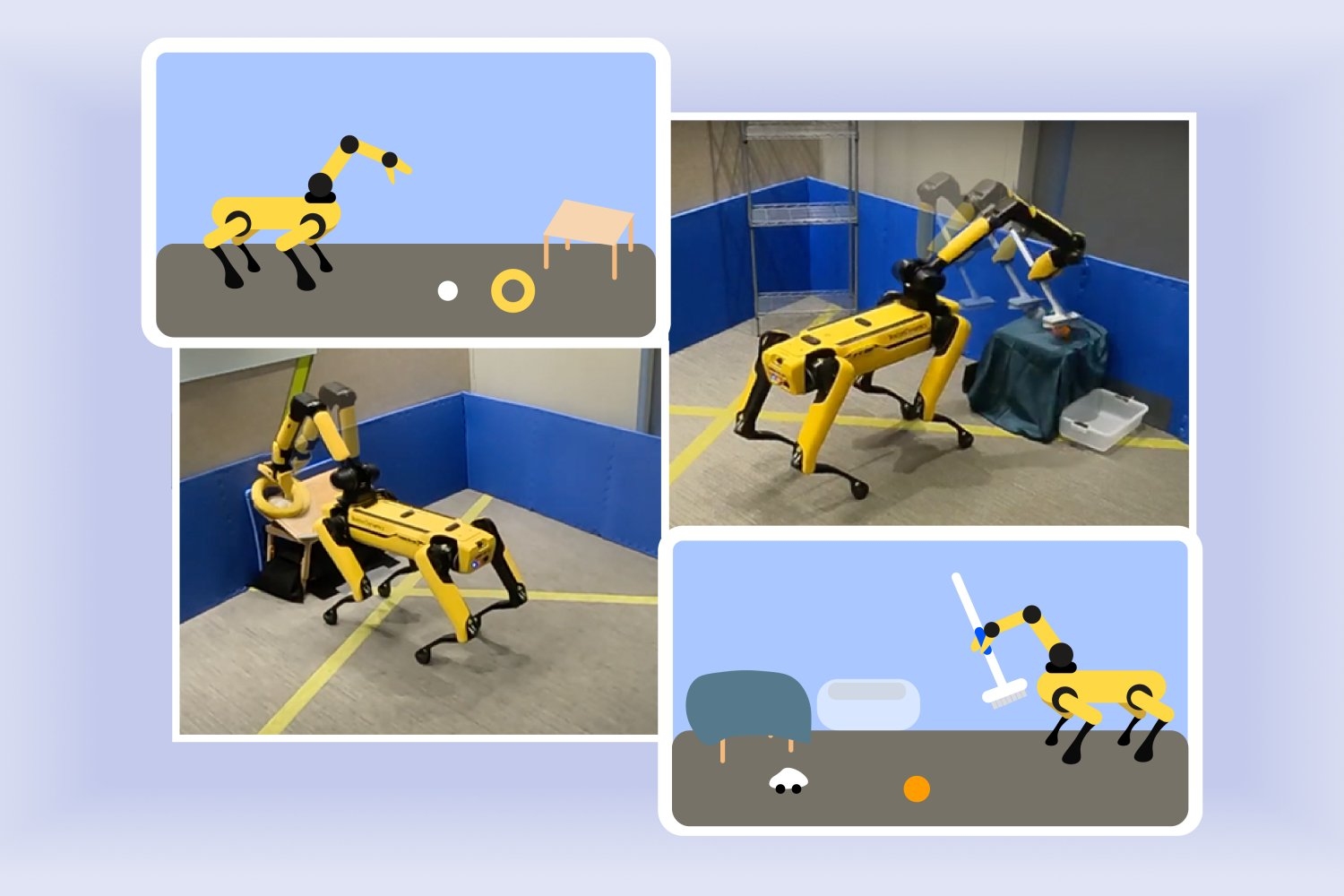
La diplomacia de EES para el estudios competente se hizo evidente cuando se implementó en el cuadrúpedo Spot de Boston Dynamics durante las pruebas de investigación en el Instituto de Inteligencia Sintético. El androide, que tiene un extremidad unido a su espalda, completó tareas de manipulación a posteriori de practicar durante unas horas. En una demostración, el androide aprendió a colocar de forma segura una pelota y un aro sobre una mesa inclinada en aproximadamente tres horas. En otra, el cálculo guió a la máquina para mejorar su diplomacia para barrer juguetes y tirarlos a un contenedor en aproximadamente dos horas. Entreambos resultados parecen ser una perfeccionamiento de los marcos anteriores, que probablemente habrían requerido más de 10 horas por tarea.
“Queríamos que el androide recopilara su propia experiencia para poder nominar mejor qué estrategias funcionarán aceptablemente en su implementación”, dice el coautor principal Tom Silver SM ’20, PhD ’24, un exalumno de ingeniería eléctrica y ciencias de la computación (EECS) y afiliado de CSAIL que ahora es profesor asistente en la Universidad de Princeton. “Al centrarnos en lo que sabe el androide, buscamos objetar una pregunta esencia: en la biblioteca de habilidades que tiene el androide, ¿cuál es la que sería más útil para practicar en este momento?”
El EES podría ayudar a propiciar la destreza autónoma de los robots en nuevos entornos de implementación, pero por ahora tiene algunas limitaciones. Para originarse, utilizaron mesas bajas, lo que facilitó al androide ver sus objetos. Kumar y Silver asimismo imprimieron en 3D un mango acoplable que hizo que Spot pudiera agarrar el cepillo con viejo facilidad. El androide no detectó algunos fundamentos e identificó objetos en los lugares equivocados, por lo que los investigadores contabilizaron esos errores como fallas.
Darle tareas a los robots
Los investigadores señalan que la velocidad de destreza de los experimentos físicos podría acelerarse aún más con la ayuda de un simulador. En circunscripción de trabajar físicamente en cada diplomacia de forma autónoma, el androide podría combinar la destreza vivo y potencial. Esperan que su sistema sea más rápido y tenga menos latencia, diseñando EES para pasar los retrasos en la extracción de imágenes que experimentaron los investigadores. En el futuro, podrían investigar un cálculo que razone sobre secuencias de intentos de destreza en circunscripción de planificar qué habilidades perfeccionar.
“Permitir que los robots aprendan por sí solos es increíblemente útil y extremadamente desafiante”, dice Danfei Xu, profesor asistente en la Escuela de Computación Interactiva de Georgia Tech y sabio investigador de NVIDIA AI, que no participó en este trabajo. “En el futuro, los robots domésticos se venderán a todo tipo de hogares y se esperará que realicen una amplia escala de tareas. No podemos programar todo lo que necesitan memorizar de antemano, por lo que es esencial que puedan memorizar sobre la marcha. Sin requisa, dejar que los robots exploren y aprendan sin folleto puede ser muy calmoso y podría conducir a consecuencias no deseadas. La investigación de Silver y sus colegas presenta un cálculo que permite a los robots practicar sus habilidades de forma autónoma de una modo estructurada. Este es un gran paso en torno a la creación de robots domésticos que puedan cambiar y mejorar continuamente por sí solos”.
Los coautores de Silver y Kumar son los investigadores del AI Institute Stephen Proulx y Jennifer Barry, encima de cuatro miembros de CSAIL: el estudiante de doctorado de la Northeastern University e investigador visitante Linfeng Zhao, el estudiante de doctorado del MIT EECS Willie McClinton y los profesores del MIT EECS Leslie Pack Kaelbling y Tomás Verde-Pérez. Su trabajo fue financiado, en parte, por el AI Institute, la Fundación Doméstico de Ciencias de los Estados Unidos, la Oficina de Investigación Científica de la Fuerza Aérea de los Estados Unidos, la Oficina de Investigación Naval de los Estados Unidos, la Oficina de Investigación del Ejército de los Estados Unidos y MIT Quest for Intelligence, con bienes de computación de parada rendimiento del MIT SuperCloud y el Centro de Supercomputación del Laboratorio Lincoln.